側邊懸浮
-
二維碼

工博士官方客服微信
-
聯系方式
聯系方式
電話:18964551752
服務時間 8:30~18:00
-
返回首頁
-
回到頂部
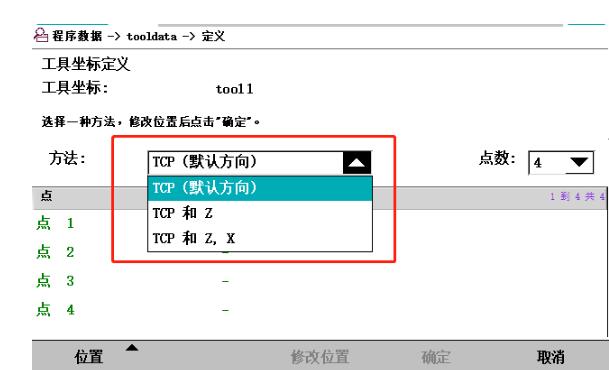
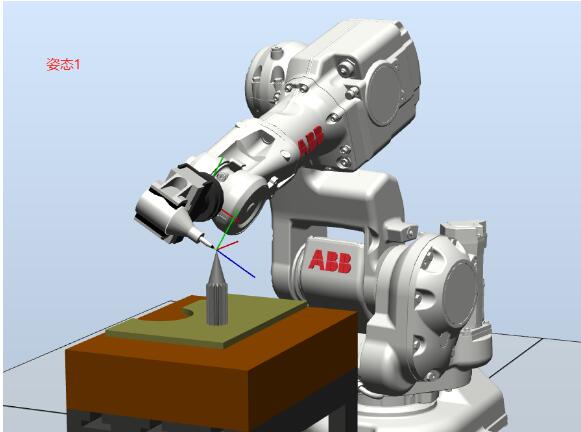
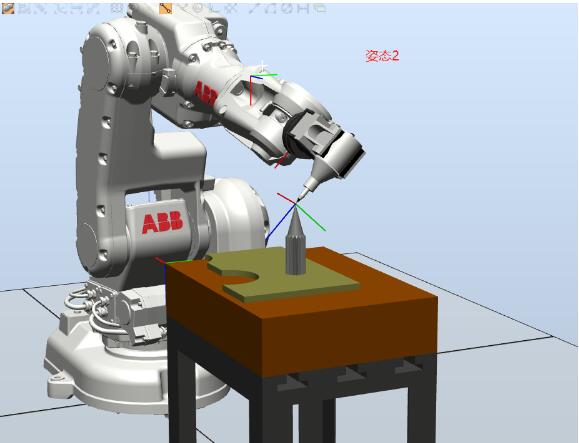
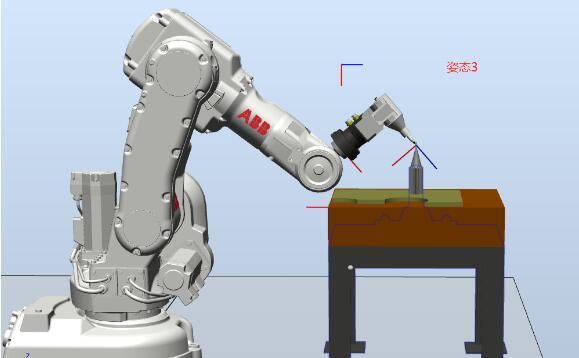
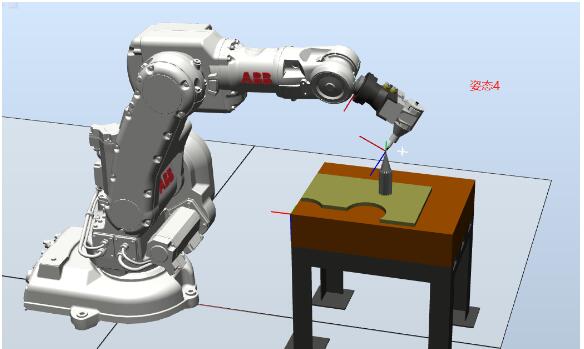
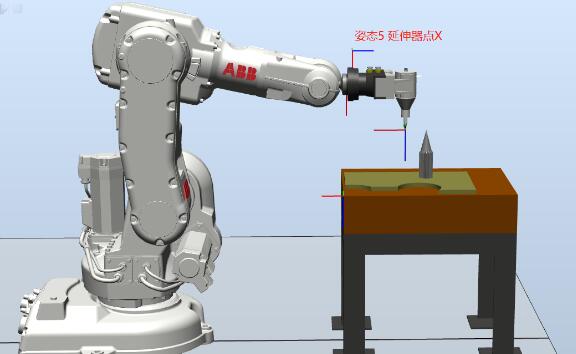
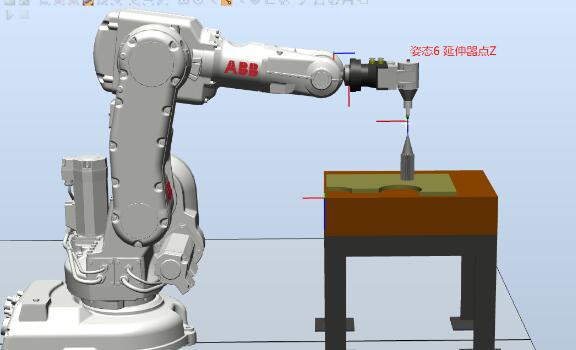
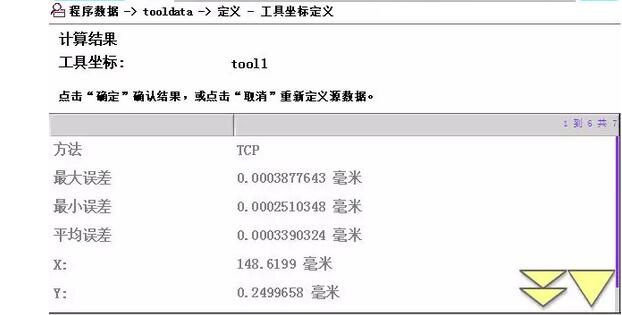
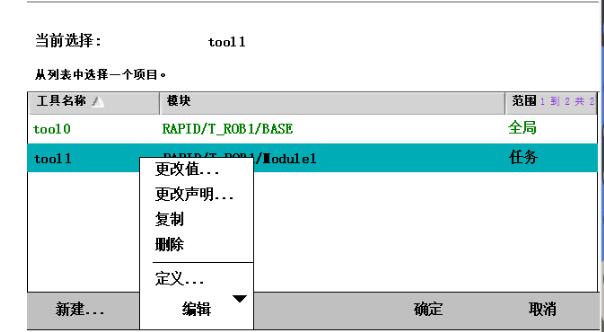
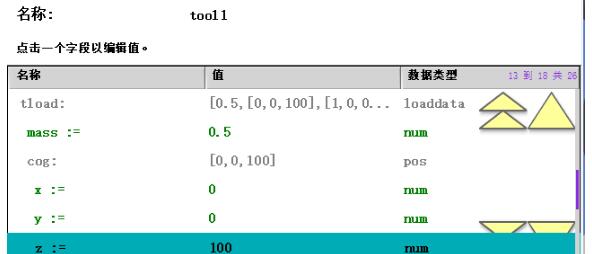
ABB機器人的工具坐標系如何設定!!!
2020-07-10 10:02:39
国产男女猛烈无遮挡免费视频|
久久国产精久久精产国|
久激情内射婷内射蜜桃|
亚洲风情亚aⅴ在线发布|
91在线国内在线播放大神|
37pao成人国产永久免费视频|
国产精品国语对白露脸在线播放
|
欧美牲交a欧美牲交aⅴ图片|
亚洲av极品无码专区在线观看
|
亚欧洲精品在线视频免费观看|
av无码精品一区二区三区四区|
精品综合久久久久久8888|
亚洲国产精品久久久久婷婷软件|
国产激情久久久久影院小草|
欧洲精品99毛片免费高清观看|
最近免费中文字幕mv在线电影|
精品国产三级a∨在线观看|
亚洲国产精品第一区二区
|
国产精品美女久久久m|
欧美最猛黑人xxxx|
成全视频免费高清|
欧洲精品码一区二区三区|
成品网站nike源码1688免费|
男男gay做爽爽视频|
92国产精品午夜福利免费|
久久精品国产精品青草|
综合亚洲伊人午夜网|
久久桃花综合桃花七七网|
18无码粉嫩小泬无套在线观看|
久久亚洲私人国产精品va|
97国产免费全部免费观看|
男人j桶女人p免费视频|
成人在线视频免费|
色妞www精品视频免费看|
国产精品内射久久久久欢欢|
无码人妻久久一区二区三区免费|
国产鲁鲁视频在线观看|
亚洲国产最大av|
久久免费看黄a级毛片|
被男按摩师添的好爽在线直播|
人人妻人人澡人人爽人人dvd
|