ABB 機器人的手動操作3 重定位運動的手動操縱
機器人的重定位運動是指機器人第六軸法蘭盤上的工具TCP點在空間中繞著坐標軸旋轉的運動,也可以理解為機器人繞著工具TCP點作姿態調整的運動。以下就是手動操縱重定位運動的方法。
第一步 選擇"手動操縱"

第二步 單擊"動作模式"。
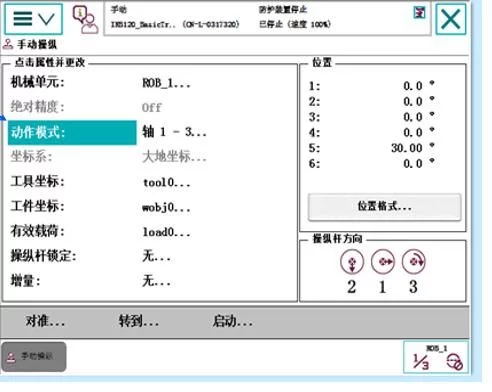
第三步 選擇"重定位",然后單擊"確定"。

第四步 單擊"坐標系"。
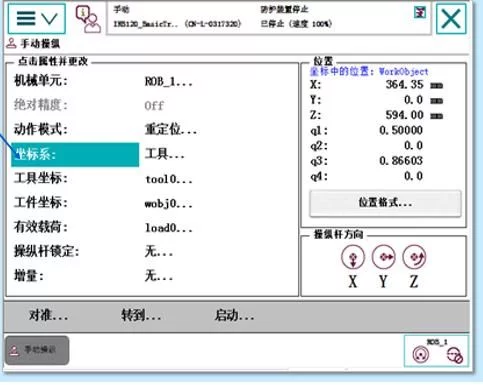
第五步 選擇"工具",然后單擊"確定"。

第六步 單擊"工具坐標"

第七步 選中對應的工具"tool1",然后單擊"確定

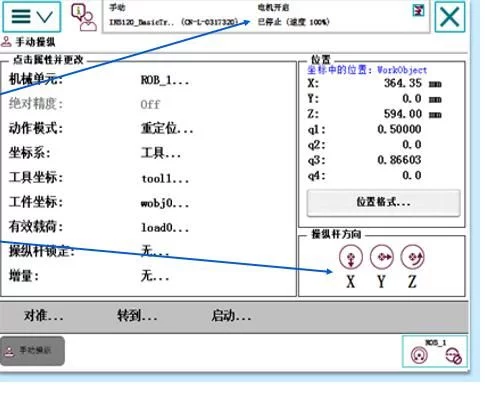
第八步 用左手按下使能按鈕,進入"電機開啟"狀態

第九步 .在狀態中,確認"電機開啟"狀態 顯示軸X、Y、Z的操縱桿方向。箭頭代表正方向。
第十步 操作示教器上的操縱桿,機器人繞著工具TCP點作姿態調整的運動。
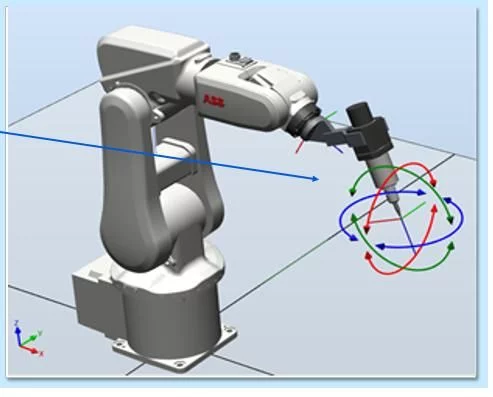
以上就是重定位的手動操作方法。

