
18964551752
上海市寶山區(qū)富聯(lián)一路98號6棟
二維碼

工博士官方客服微信
聯(lián)系方式
聯(lián)系方式
電話:18964551752
服務(wù)時間 8:30~18:00
返回首頁
回到頂部
分享ABB機器人編程技巧
2018-05-09 16:42:19
第一:拖入YuMi,導(dǎo)入抓手并安裝到機器人,并創(chuàng)建系統(tǒng)

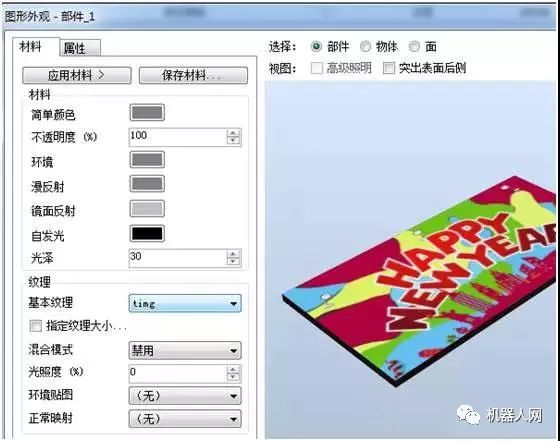
第二:創(chuàng)建一個矩形體,舉例400*200*10,并右擊修改-圖形顯示,基本文理導(dǎo)入圖片
第三:調(diào)整矩形體位置并安裝到機器人左手上,出現(xiàn)是否修改位置,選擇“否”

第四:激活右手機器人,并創(chuàng)建坐標(biāo)系,坐標(biāo)系由左手驅(qū)動

第五:記錄當(dāng)前右手機器人在左手坐標(biāo)系下的點,并創(chuàng)建語句moveL

第六:激活左手,記錄多個運動語句并創(chuàng)建

第七:把路徑同步到機器人rapid
第八:此處需要使用機器人同步。YuMi在創(chuàng)建系統(tǒng)時自動加入了604-1同步協(xié)調(diào)選項
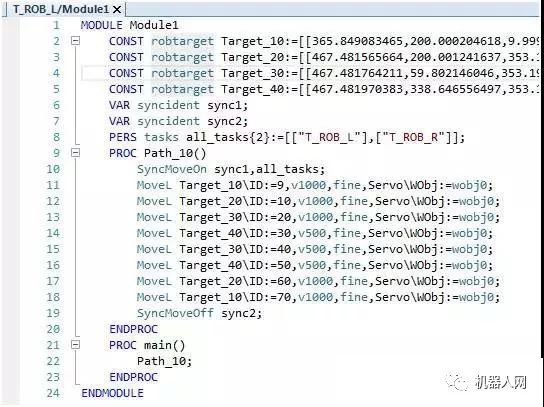
第九:左手機器人代碼如下
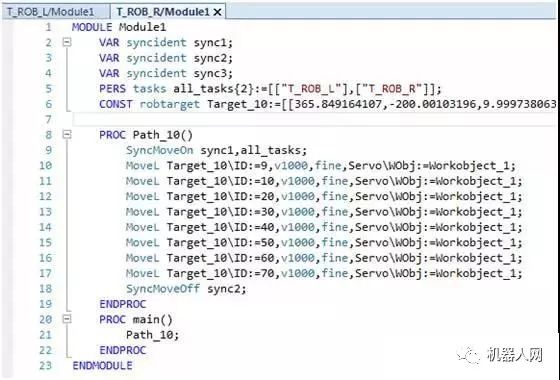
第十:右手機器人代碼如下

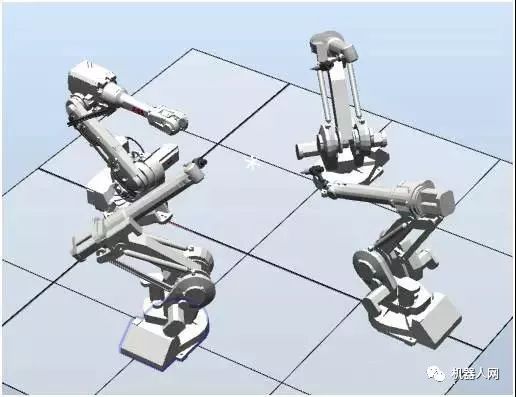
2、4臺機器人協(xié)同運動
第一:導(dǎo)入4臺1410機器人并調(diào)整布局
第二:導(dǎo)入三個工具并安裝到3臺機器人上
第三:制作產(chǎn)品工件,并安裝到機器人1上

第四:從布局創(chuàng)建系統(tǒng),其中第一臺機器人持有工件
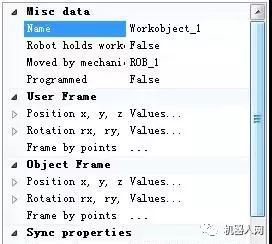
第五:激活T_ROB2,即在第二臺機器人下,在1號機器人持有的工件下做工件坐標(biāo)系,其中,坐標(biāo)系由ROB_1驅(qū)動
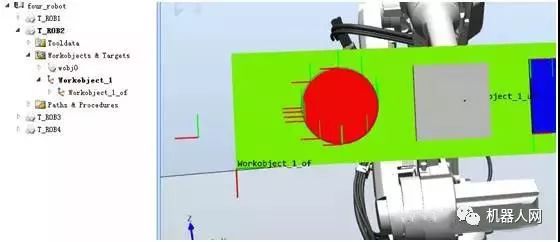
第六:2號機器人在這個坐標(biāo)系完成軌跡。
第七:同理完成3號和4號機器人軌跡
第八:點擊multimove按鈕

第九:設(shè)定完起始位置后,點擊Play,系統(tǒng)自動計算4臺機器人軌跡

第十:計算成功后,會得到MMPath1,同步到RAPID
第十一:測試運行